重心法
出自 MBA智库百科(https://wiki.mbalib.com/)
重心法(The centre-of-gravity method)
目錄 |
重心法(The centre-of-gravity method)是一種設置單個廠房或倉庫的方法,這種方法主要考慮的因素是現有設施之間的距離和要運輸的貨物量,經常用於中間倉庫或分銷倉庫的選擇。商品運輸量是影響商品運輸費用的主要因素,倉庫儘可能接近運量較大的網點,從而使較大的商品運量走相對較短的路程,就是求出本地區實際商品運量的重心所在的位置。
The centre-of-gravity method is used to find a location which minimizes transportation costs. It is based on the idea that all possible location have value which is the sum of all transportation costs to and from that location. The best location, the one which minimizes costs, is represented by what in a physical analogy would be the weighted centre-of-gravity of all points to and from which goods are transported.
In practice, the optimum location might also be influenced by other factors such as the transportation network. so if the optimum location was at a point with poor access to a suitable road or at some other unsuitable location (in a residential area or the middle of a lake for example) then the location will need to be adjusted.
重心法首先要在坐標系中標出各個地點的位置,目的在於確定各點的相對距離。坐標系可以隨便建立。在國際選址中,經常採用經度和緯度建立坐標。然後,根據各點在坐標系中的橫縱坐標值求出成本運輸最低的位置坐標X和Y,重心法使用的公式是:


公式中
- Cx-- 重心的x坐標;
- Cy-- 重心的y坐標;
- Dix--第i個地點的x坐標;
- Diy--第i個地點的y坐標;
- Vi--運到第i個地點或從第i個地點運出的貨物量。
最後,選擇求出的重心點坐標值對應的地點作為要佈置設施的地點。
重心法是在理想條件下求出的倉庫位置,但模型中的假設條件在實際會受到一定的限制。重心法計算中簡化的假設條件包括以下幾方面:
⑴模型常常假設需求量集中於某一點,而實際上需求來自分散於廣闊區域內的多個消費點。
⑵模型沒有區分在不同地點建設倉庫所需的資本成本,以及與在不同地點經營有關的其他成本的差別,而只計算運輸成本。
⑶運輸成本在公式中是以線性比例隨距離增加的,而運費是不隨運距變化的固定的部分和隨運距變化的可變部分組成。
⑷模型中倉庫與其他網路節點之間的路線通常假定為直線。而應該選用的是實際運輸所採用的路線。
⑸模型未考慮未來收入和成本的變化。
從以上假設中可以看出模型存在諸多的限制條件,但這也並不意味著模型沒有使用價值。重要的是選址模型的結果對事實問題的敏感程度。如果簡化假設條件,對模型設施選址的建議影響很小或根本沒有影響,那麼可以證明簡單的模型比複雜的模型更有效。
案例一:基於重心法在產品屬性最優點選擇中的應用[1]
一、引言
在消費者市場中,受各種環境因素的影響,使不同消費者對同一產品的需求存在很大差異,形成不同的消費偏好。具有相似或者相近偏好的消費者構成消費者集群,某種產品的消費者市場往往存在若幹個消費者集群。產品屬性是影響顧客購買行為的重要因素,企業推行無差異營銷策略時,就必須把產品的屬性定位於某個最優點,使產品最大限度地滿足消費者需求,即把所有消費者對產品的不滿意程度降到最小。在實務中,企業面對一個存在若幹個消費者集群的市場,企業必須尋找產品屬性最優點,用同一種符合該屬性的產品去滿足不同集群消費者的需要,這樣比較經濟。重心法是單一設施選址常用的數學方法,它將運輸成本作為唯一的選址決策依據,以追求配送成本的最小化為目標,尋找最優配送中心。現有的文獻對重心法的應用研究僅僅局限在傳統的物流選址問題上。嘗試在新領域應用重心法,將產品屬性最優點定位問題轉化為配送中心選址問題,利用重心法確定產品屬性最優點,使所有消費者對產品的不滿意程度最小,從而為企業在產品設計開發工作中提供一種選擇途徑。
二、模型建立
1.模型假設。基於以下假設建立模型:
(1)屬性A和屬性B為某種產品的兩個關鍵屬性,對消費者的購買行為產生決定性的影響。令X,Y分別代表消費者對產品屬性A和屬性B的偏好,所有X與Y的組合可以形成一個連續的二維坐標平面,每個消費者對屬性A和屬性B的偏好組合可以表示為坐標系X0 Y中的一個點(X,Y),定義為消費者偏好點。
(2)消費者存在差異性偏好,對該產品屬性存在相似偏好的消費者構成消費者集群,並且消費者市場存在不同的消費者集群,每個消費者集群對屬性A與屬性B的偏好組合在坐標平面內形成點集。
消費者市場存在4個消費者集群,形成4個消費者偏好點集。用一個最小的圓把每個消費者偏好點集的所有點圈住,令各圓心分別代表消費集群的偏好,定義為消費者集群的偏好中心(Xi,Yi)。
(3)企業在該消費者市場上採用無差異營銷策略,只開發一種產品,該產品的屬性對應X0Y坐標平面內唯一的點(X0,Y0),該點定義為產品中心。
2.重心法尋找最優產品中心。由於企業採用無差異營銷策略,而消費者存在差異性偏好,因而消費者對該企業的產品屬性必然存在不滿意。不同消費者集群對產品屬性的偏好不同,造成不同消費者集群對產品屬性的不滿意程度不同。各個消費者集群的不滿意程度可以通過一定的方法測出,其測量等價於顧客滿意度的測量。顧客滿意度可以用等級法進行分級,把顧客滿意度分為6級。
6個顧客滿意度等級:很不滿意,不滿意,不太滿意,較滿意,滿意,很滿意。它們分別賦值0,20,40,60,80,100。顧客的滿意度得分為 ,其中
,其中 代表調查項目的顧客評分和,N代表調查產品屬性的數量。因而,消費者的不滿意程度表示為b=100-CSM,b越大,表示消費者對產品的不滿意程度越大,反之,則越小。以某產品為例,見下表。
代表調查項目的顧客評分和,N代表調查產品屬性的數量。因而,消費者的不滿意程度表示為b=100-CSM,b越大,表示消費者對產品的不滿意程度越大,反之,則越小。以某產品為例,見下表。
某產品的消費者不滿意測量表
| 產品屬性 | A | B |
| 顧客滿意級別 | 較滿意 | 滿意 |
| 分值 | 60 | 80 |
| 消費者不滿意度 | b=100-CSM=100[(60+80)/2]=30 | |
上表展示該產品的調查項目有屬性A與屬性B,利用公式b=100-CSM求出消費者對該產品的不滿意度為30分。
企業對產品屬性進行定位時,必須找到最優產品屬性中心,使得此產品最大限度地滿足所有消費者偏好,消費者對該產品總不滿意程度最小。此問題轉化為配送中心選址問題,利用重心法求出最優產品屬性中心。
令消費者集群i的偏好中心(Xi,Yi)與產品屬性中心(X0,Y0)的直線距離為。
 (1)
(1)
假設在其他條件不變的情況下,消費者集群i對產品不滿意程度與距離Di成線性關係,距離Di越大代表消費者集群對產品不滿意程度越大,反之亦然。並假設當Di = 0時,消費者集群對產品不滿意程度為0。在其他條件不變的情況下,單位距離Di代表的不滿意程度,定義為消費者集群i的不滿意率Ki。對於某個消費者集群i,其所包含的每個消費者不滿意率Ki相等,但不同的消費者集群i所對應的不滿意率Ki不一定相等。不同的消費者集群對產品的需求量不同,在表示消費者集群對產品不滿意程度時,模型需要引入需求量作為影響因素。因而,令消費者集群i對產品的需求量為Wi,則消費者集群i對產品的不滿意程度表示為
 (2)
(2)
設某種產品消費者市場存在n個消費者集群,偏好中心為(Xi,Yi)(i=1,2,...,n),該產品的產品屬性中心為(X_0,Y_0),則該市場所有消費者集群對該產品的總不滿意程度表示為。
 (3)
(3)
求使B最小的最優產品中心 ,則
,則

解得最優產品中心為
 。
。
採用迭代法求出,迭代步驟如下:
(I)對於式子(6)和式子(7),令Di = 1,得到產品中心初始點 ;
;
(II)利用式子(1),式子(3),求出與相應的總不滿意程度B0;
(III)把代入式子(1)、式子(6)、式子(7),計算出產品屬性中心改善點 ;(IV)利用式子(1)與式子(3),計算出與相應的總不滿意程度B';(V)B1與B0比較:如果B1 < B0,則返回步驟(III),把代入式子(1)、式子(6)、式子(7),計算出產品屬性中心再改善點
;(IV)利用式子(1)與式子(3),計算出與相應的總不滿意程度B';(V)B1與B0比較:如果B1 < B0,則返回步驟(III),把代入式子(1)、式子(6)、式子(7),計算出產品屬性中心再改善點 ;如果
;如果 ,則說明就是最優解。這樣反覆計算,直到
,則說明就是最優解。這樣反覆計算,直到 為止,得到
為止,得到 就是最優產品中心,此時消費者對產品的總不滿意程度最小。
就是最優產品中心,此時消費者對產品的總不滿意程度最小。
在實踐中,企業可以在不同情況下利用重心法尋找最優產品中心,對產品屬性進行定位,使消費者對產品的總不滿意程度最小:
(1)如果某種產品尚未處於設計階段,企業可以通過市場調查,預測消費者集群數目n,每個消費者集群需求量Wi以及不滿意率Ki。當沒有充足的資料預測消費者集群不滿意率Ki,可以認為所有消費者集群的不滿意率Ki相等。企業利用重心法初步求出最優產品屬性中心,從而相應地設計開發產品,投入市場測試消費者對產品的反應。通過此方法,企業可以在產品的市場測試階段,儘量降低消費者對該產品的總不滿意程度,初步在消費者市場塑造良好的產品形象。待該產品投入市場一段時間後,重新進行市場調查,反饋測試信息,再相應地根據消費者集群數目n,每個消費者集群i的需求量Wi及相應的不滿意率Ki,利用重心法求出最優產品屬性中心,改進產品的屬性,重新把改進的產品推向市場,最大限度地滿足消費者的偏好,使消費者對產品的總不滿意程度最小。利用重心法對產品屬性進行定位,可以避免新產品屬性設計開發工作的盲目性,使產品在市場測試期間更好地塑造良好的產品形象,可作為產品屬性改進工作的理論依據。
(2)如果某種產品早已經投入市場銷售,由於市場環境變化,消費者集群數目n、需求量W_i、不滿意率K_i等發生變化。企業需要根據市場情況,對產品屬性進行適當的調整,則可利用重心法找到最優產品屬性中心,作為產品屬性重新定位工作的理論參考。
三、應用實例
某飲料廠生產汽水,已知該種汽水的檸檬酸濃度和糖精濃度對消費者的購買行為產生決定性影響。經過市場調查,發現消費者對汽水檸檬酸濃度和糖精濃度的偏好組合不同,市場存在5個消費者集群,按每500mL汽水含X單位檸檬酸和Y單位糖精計算,消費者集群偏好中心(Xi,Yi)分別為:(50,45),(30,60),(32,20),(40,30),(20,50);需求量:W1 = 50,W2 = 80,W3 = 90,W4 = 30,W5 = 75;不滿意率:K1 = 2,K2 = 7,K3 = 5,K4 = 4,K5 = 8。
企業採用無差異營銷戰略銷售汽水,則按每500mL汽水含X單位檸檬酸和Y單位糖精的組合標準配製汽水,X、Y各為多少時,汽水才能最大限度地滿足各個消費者集群的偏好,使得消費者對該汽水的總不滿意程度最小?利用重心法尋找汽水的最優產品屬性中心,演算法如下:對於式子(6)、式子(7),令D1 = 1求出汽水的產品屬性中心初始點:
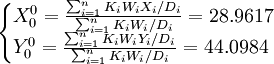
用迭代法改善該產品屬性中心初始點,據式子(1)得D1 = 21.0576,D2 = 15.9355,D3 = 24.2891,D4 = 17.9055,D5 = 10.7304,因而消費者的總不滿意度為:

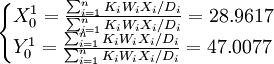
據式子(1)、式子(6)、式子(7)求出產品屬性中心改善點,得到。(見右)據式子(1)、式子(3),利用求出Di(Di的計算結果略)與 利用
利用 ,因為
,因為 ,所以初始點(28.9617,44.0984)並非汽水的最優產品屬性中心,繼續迭代運算。迭代過程不再詳述,迭代結果如下表所示。
,所以初始點(28.9617,44.0984)並非汽水的最優產品屬性中心,繼續迭代運算。迭代過程不再詳述,迭代結果如下表所示。
迭代運算結果表
| 迭代次數j |  |  | 總不滿意度Bj |
| 0 | 2896.17 | 44.0984 | 30546.7 |
| 1 | 27.0248 | 47.0077 | 29276.6 |
| 2 | 25.8468 | 48.6027 | 28812.6 |
| 3 | 25.1104 | 49.6027 | 28679.3 |
| 4 | 24.6479 | 49.5103 | 28679.3 |
| 5 | 24.3434 | 49.5766 | 28622.1 |
| 6 | 24.1324 | 49.5934 | 28614.0 |
| 7 | 23.9811 | 49.5977 | 28607.3 |
| 8 | 23.8700 | 49.5994 | 28607.3 |
| 9 | 23.7872 | 49.6007 | 28605.9 |
| 10 | 23.7246 | 49.6019 | 28605.2 |
| 11 | 23.6404 | 49.6030 | 28604.7 |
| 12 | 23.6404 | 49.6040 | 28604.4 |
| 13 | 23.6122 | 49.6048 | 28604.3 |
| 14 | 23.5903 | 49.6055 | 28604.2 |
| 15 | 23.5734 | 49.6060 | 28604.1 |
| 16 | 23.5602 | 49.6064 | 28604.1 |
| 17 | 23.5499 | 49.6068 | 28604.0 |
| 18 | 23.5418 | 49.6071 | 28604.0 |
| 19 | 23.5355 | 49.6073 | 28604.0 |
 。
。
從上表發現,隨迭代次數增加, 不斷地向汽水的最優產品屬性中心調整,消費者的總不滿意度不斷減少。從迭代次數17開始,消費者的總不滿意程度達到最小值28604.0,並保持不變,滿足Bk + 1 = Bk。所以迭代到第17次時,開始找到汽水的最優產品屬性中心(23.5499,49.6068)。因而該企業生產汽水,按每500mL汽水含23.5499單位檸檬酸和49.6068單位糖精的組合標準配製,消費者的總不滿意程度達到最小值28604.0。通過此實例分析,說明基於重心法尋找產品屬性最優點的理論方法具有實用意義。
不斷地向汽水的最優產品屬性中心調整,消費者的總不滿意度不斷減少。從迭代次數17開始,消費者的總不滿意程度達到最小值28604.0,並保持不變,滿足Bk + 1 = Bk。所以迭代到第17次時,開始找到汽水的最優產品屬性中心(23.5499,49.6068)。因而該企業生產汽水,按每500mL汽水含23.5499單位檸檬酸和49.6068單位糖精的組合標準配製,消費者的總不滿意程度達到最小值28604.0。通過此實例分析,說明基於重心法尋找產品屬性最優點的理論方法具有實用意義。
把一個推行無差異營銷策略的企業尋找產品屬性最優點問題轉化為配送中心選址問題,以消費者的總不滿意程度最小為決策依據,利用重心法求出產品屬性的最優點。通過實例分析,指出該方法具有實用意義。但把只有兩種關鍵屬性的產品作為研究對象,至於具有兩種以上關鍵屬性的產品屬性最優點問題有待進一步研究。
案例二:重心法在光電信號處理中的應用[2]
一、引言
在國家大型項目LAMOST(Large Sky Area Multi-Object Fiber Spectroscopy Telescope,大天區多目標光纖光譜天文望遠鏡)預研中,為了標定4000根光纖在焦平面上的位置,採用線陣CCD感測器去掃描從光纖中出來的光斑。要較為精確地得到光斑的位置及其在移動時變動的距離,找出光信號上某一位置穩定點是關健。以線陣CCD採集到的光纖出射光斑中某一截面上的信號為例說明在尋找穩定點中與常用的最大值法和截止電壓法相比,重心法具有重覆精度高,穩定性好等優點。
二、常用方法
用線陣CCD採集到的光纖出射光斑的某一截面形狀如圖1所示。N為採樣次序,V(N)為與採樣次序相對應的電平。

1.最大值法
對於如圖1(a)所示信號,找出其最大值A點。
2.截止電壓法
如圖1(b)所示,用截止電壓V=k1Vmax+k2Vmin去截信號,求得N1,N2兩點。其中k1=k2=0.5,此時在截止電壓V與曲線的交點附近曲線較陡,測量值的變化量較小,測量的穩定性好。取與(N1+N2)/2相對應的點A作為信號的代表點。
三、重心法
重心法是對信號進行面積分,積分區域取與截止電壓 相對應點之間的區域,實驗顯示,當k=0.1時,x值及其12次重覆採樣的偏差σ與在整個信號積分時相差不大。當k>0.1且不斷增加時,x值的不穩定性和偏差σ顯著增加。如圖1(c)所示,其中第N區域的面矩為
相對應點之間的區域,實驗顯示,當k=0.1時,x值及其12次重覆採樣的偏差σ與在整個信號積分時相差不大。當k>0.1且不斷增加時,x值的不穩定性和偏差σ顯著增加。如圖1(c)所示,其中第N區域的面矩為![{V_N[(N+1)-N]}\cdot N](/w/images/math/5/4/c/54c7b98f3cefce9a922771f98193a4af.png) ,面積因此採樣到的每兩個點對應著一個CCD像元,即CCD的每個像元被連續採樣兩次。即
,面積因此採樣到的每兩個點對應著一個CCD像元,即CCD的每個像元被連續採樣兩次。即
為VN[(N + 1) − N],求出整個信號的重心NA為。
![N_A=\frac{\sum{V_N[(N+1)-N]}\cdot N}{\sum V_N[(N+1)-N]}=\frac{\sum V_N\cdot N}{\sum V_N}](/w/images/math/2/9/7/297c269bf41c06c1c79775b1daf73bf5.png)
四、實驗裝置及原理
實驗裝置圖如圖2所示

1—精密水平移動工作台,精度為0.2μm;2—線陣CCD;3—CCD驅動扳;4—放大濾波電路;5—A/D轉換及介面板;6—486微機;7—示波器;8—光纖;9—點光源裝置,採用滷鎢燈作為發光器件。

CCD為光電轉換裝置,將接收到的空間光強分佈轉換為隨時間變化的電壓信號,如圖3(a)和圖3(b)所示,其轉換關係為。
 (1)
(1)
 (2)
(2)
 (3)
(3)
 (4)
(4)
 (5)
(5)
如圖3(c)所示。
當信號沿圖2中x方向移動一段距離時(在本實驗中光纖不動,CCD固定在水平移動工作臺上並隨其一起動):
d = XB − XA = 6.5(NB − NA) (6)
如圖1(a)所示。
其中fd(=1/Td)為CCD驅動頻率;R為光敏單元的幾何尺寸。
在本實驗中採用的CCD型號為TH7805A,有效感光像元數為2048個,像元尺寸為13μm×13μm,R=13μm,工作時採用的驅動頻率為500kHz。
信號處理過程如圖4所示。

在實驗系統中低通濾波的截止頻率為2kHz,高通濾波的截止頻率為13Hz。A/D轉換器為MAX118C,其採樣頻率為1MHz。
五、實驗結果
表1 三種方法的σ值比較
| σ/μm | ||
| 距離L/mm | 5 | 10 |
| 最大值法 | 34.13-84.18 | 92.37-199.68 |
| 截止電壓法 | 0-5.66 | 8.06-32.63 |
| 重心法 | 0.46-0.91 | 1.37-4.03 |
表1為當CCD像元錶面與光纖端面之間距離L分別約為5.0mm,10.0mm, CCD位置沿圖2中x方向水平移動時,通過21次單次測量,每次測量重覆採樣12次的三種方法的x均方很差值σ。由表1可見,當L=5mm時,重心法的偏差σ最小,在1μm以內,而且隨著L的增加,其它兩種方法的σ劇增,而重心法的σ變動較小。由此可見,儘管該CCD本身像敏單元的幾何分辨力只有13μm,通過重心法可使信號的位置偏差保持在1μm以內。

三種方法的d值比較
在圖5中,圖5(a)為圖2中L約為5.0mm時,水平移動工作台沿x方向每移動2mm,按公式(6)求得d的測量結果。圖5(b)為L增加至10.0mm時測量的結果。其中虛線1為最大值法結果,雙點劃線2為截止電壓法結果,實線3為重心法結果。在CCD兩端處d值波動較大。
在圖5(a)中,用重心法測得的d值在1.990~2.010mm之間,變化在±10μm以內,其中包括水平移動工作台本身的系統誤差及讀數的偶然誤差。隨著沿z方向距離的增加,重心法的穩定性顯然最好。但重心法也存在缺點,若CCD感受不到完整的信號或所選取的信號積分區域太窄,其誤差將顯著增加。信號信噪比越高,光信號落在CCD像敏單元上的範圍越小,其效果越好。在本實驗中,這與CCD與光纖端面之間的距離、光纖的數值孔徑、光源的強弱、光源與光纖之間的光耦合等因素有關。
六、分析及結論
從微觀上來看,從CCD出來的電信號是一個個幅值不同的脈衝,一個像元對應著一個脈衝,如圖2(b)所示。設理想採樣,由於每個像元被採樣兩次,當用最大值法時,採得最大幅值電壓脈衝上某點為最大值點,那麼在下次或前次採樣時,採樣點可能同樣落在該電壓脈衝上。此外存在光響應的非均勻性,在某些像元上缺陷密集而形成暗電流尖峰以及受A/D轉換的精度限制。
因此與最大值對應的點就不是唯一的且採樣點本身的不確定度為6.5μm。當用截止電壓法時,與截止電壓相對應的點同樣存在以上現象。但由於對選取的兩點進行了平均,可以抵消部分不確定度。重心法是對區域信號求面積的矩,然後再在區域內作面積平均,對將近4000個點進行了加權平均,可顯著降低每個點對整個信號的影響,有利於消除系統誤差,減小隨機誤差,提高值的穩定性和重覆精度。事實上,由於系統本身存在光源電壓的波動,CCD光敏單元的不均勻性,CCD中的暗電流和電雜訊,電路的溫漂等和周圍工作環境如雜散光的影響,所以重覆採集到的信號總存在著漂移和隨機干擾,這就更增加了最大值法和截止電壓法的不穩定性。
在LAMOST項目中是針對光纖出射光進行研究的,其在空間呈二維分佈,雖然在這裡討論的只是一維方向的問題,但重心法同樣可以應用到二維光信號的處理。
重心法還可以推廣到對不規則信號及多峰信號進行類似的處理。







{kind=link}
重心法還可以推廣到對不規則信號及多峰信號進行類似的處理。