模糊控制理論
出自 MBA智库百科(https://wiki.mbalib.com/)
模糊控制理論 Fuzzy Control
目錄 |
模糊控制概述[1]
“模糊”是人類感知萬物,獲取知識,思維推理,決策實施的重要特征。“模糊”比“清晰”所擁有的信息容量更大,內涵更豐富,更符合客觀世界。
在日常生活中,人們的思維中有許多模糊的概念,如大、小、冷、熱等,都沒有明確的內涵和外延,只能用模糊集合來描述。人們常用的經驗規則都是用模糊條件語句表達,例如,當我們擰開水閥往水桶里註水時,有這樣的經驗:桶里沒水或水較少時,應開大水閥;桶里水較多時,應將水閥關小些;當水桶里水快滿時,則應把閥門關得很小;而水桶里水滿時應迅速關掉水閥。其中,“較少”、“較多”、“小一些”、“很小”等,這些表示水位和控制閥門動作的概念都具有模糊性。即有經驗的操作人員的控制規則具有相當的模糊性。模糊控制就是利用電腦模擬人的思維方式,按照人的操作規則進行控制,實現人的控制經驗。
模糊控制理論是由美國著名的學者加利福尼亞大學教授Zadeh·L·A於1965年首先提出,它以模糊數學為基礎,用語言規則表示方法和先進的電腦技術,由模糊推理進行決策的一種高級控制策略。
1974年,英國倫敦大學教授Mamdani·E·H研製成功第一個模糊控制器,充分展示了模糊技術的應用前景。
模糊邏輯控制(Fuzzy Logic Control)簡稱模糊控制(Fuzzy Control),是以模糊集合論、模糊語言變數和模糊邏輯推理為基礎的一種電腦數字控制技術。1965年,美國的L.A.Zadeh創立了模糊集合論;1973年他給出了模糊邏輯控制的定義和相關的定理。1974年,英國的E.H.Mamdani首先用模糊控制語句組成模糊控制器,並把它應用於鍋爐和蒸汽機的控制,在實驗室獲得成功。這一開拓性的工作標志著模糊控制論的誕生。
模糊控制實質上是一種非線性控制,從屬於智能控制的範疇。模糊控制的一大特點是既具有系統化的理論,又有著大量實際應用背景。模糊控制的發展最初在西方遇到了較大的阻力;然而在東方尤其是在日本,卻得到了迅速而廣泛的推廣應用。近20多年來,模糊控制不論從理論上還是技術上都有了長足的進步,成為自動控制領域中一個非常活躍而又碩果纍纍的分支。其典型應用的例子涉及生產和生活的許多方面,例如在家用電器設備中有模糊洗衣機、空調、微波爐、吸塵器、照相機和攝錄機等;在工業控制領域中有水凈化處理、發酵過程、化學反應釜、水泥窯爐等的模糊控制;在專用系統和其它方面有地鐵靠站停車、汽車駕駛、電梯、自動扶梯、蒸汽引擎以及機器人的模糊控制等。
模糊控制的基本理論[2]
所謂模糊控制,就是在控制方法上應用模糊集理論、模糊語言變數及模糊邏輯推理的知識來模擬人的模糊思維方法,用電腦實現與操作者相同的控制。該理論以模糊集合、模糊語言變數和模糊邏輯為基礎,用比較簡單的數學形式直接將人的判斷、思維過程表達出來,從而逐漸得到了廣泛應用。應用領域包括圖像識別、自動機理論、語言研究、控制論以及信號處理等方面。在自動控制領域,以模糊集理論為基礎發展起來的模糊控製為將人的控制經驗及推理過程納入自動控制提供了一條便捷途徑。
如下圖所示,模糊控制器的基本結構包括知識庫、模糊推理、輸入量模糊化、輸出量精確化四部分。

2.知識庫
知識庫包括模糊控制器參數庫和模糊控制規則庫。模糊控制規則建立在語言變數的基礎上。語言變數取值為“大”、“中”、“小”等這樣的模糊子集,各模糊子集以隸屬函數表明基本論域上的精確值屬於該模糊子集的程度。因此,為建立模糊控制規則,需要將基本論域上的精確值依據隸屬函數歸併到各模糊子集中,從而用語言變數值(大、中、小等)代替精確值。這個過程代表了人在控制過程中對觀察到的變數和控制量的模糊劃分。由於各變數取值範圍各異,故首先將各基本論域分別以不同的對應關係,映射到一個標準化論域上。通常,對應關係取為量化因數。為便於處理,將標準論域等分離散化,然後對論域進行模糊劃分,定義模糊子集,如NB、PZ、PS等。
同一個模糊控制規則庫,對基本論域的模糊劃分不同,控制效果也不同。具體來說,對應關係、標推論域、模糊子集數以及各模糊子集的隸屬函數都對控制效果有很大影響。這3類參數與模糊控制規則具有同樣的重要性,因此把它們歸併為模糊控制器的參數庫,與模糊控制規則庫共同組成知識庫。
模糊控制規則的來源有3條途徑:基於專家經驗和實際操作,基於模糊模型,基於模糊控制的自學習。
3.模糊化
將精確的輸入量轉化為模糊量F有兩種方法:
(1)將精確量轉換為標準論域上的模糊單點集。精確量x經對應關係G轉換為標準論域x上的基本元素,則該元素的模糊單點集F為
uF(u)=1 if u=G(x)

(2)將精確量轉換為標準論域上的模糊子集。
精確量經對應關係轉換為標準論域上的基本元素,在該元素上具有最大隸屬度的模糊子集,即為該精確量對應的模糊子集。
4.模糊推理
最基本的模糊推理形式為:
前提1 IF A THEN B
前提2 IF A′
結論 THEN B′
其中,A、A′為論域U上的模糊子集,B、B′為論域V上的模糊子集。前提1稱為模糊蘊涵關係,記為A→B。在實際應用中,一般先針對各條規則進行推理,然後將各個推理結果總合而得到最終推理結果。
5.精確化
推理得到的模糊子集要轉換為精確值,以得到最終控制量輸出y。目前常用兩種精確化方法:
(1)最大隸屬度法。在推理得到的模糊子集中,選取隸屬度最大的標準論域元素的平均值作為精確化結果。
(2)重心法。將推理得到的模糊子集的隸屬函數與橫坐標所圍面積的重心所對應的標準論域元素作為精確化結果。
在得到推理結果精確值之後,還應按對應關係,得到最終控制量輸出y。
模糊控制理論研究的現狀[2]
儘管模糊控制理論已經取得了可觀的進展,但與常規控制理論相比仍不成熟。模糊控制系統的分析和設計尚未建立起有效的方法,在很多場合下仍然需要依靠經驗和試湊。近年來,許多人一直嘗試將常規控制理論的概念和方法擴展至模糊控制系統,而模糊控制與神經網路相結合的方法已成為研究的熱點,二者的結合有效地推動了自學習模糊控制的發展。
模糊控制易於獲得由語言表達的專家知識,能有效地控制那些難以建立精確模型而憑經驗可控制的系統,而神經網路則由於其仿生特性更能有效利用系統本身的信息,並能映射任意函數關係,具有並行處理和自學習能力,容錯能力也很強。在集成大系統中,神經網路可用於處理低層感知數據,模糊邏輯可用於描述高層的邏輯框架[5]。模糊邏輯與神經網路的結合有兩種情況:一是將模糊技術用於神經網路形成模糊神經網路,一是用神經網路實現模糊控制。這兩方面均見於大量的研究文獻。
常規模糊控制的兩個主要問題在於:改進穩態控制精度和提高智能水平與適應能力。從大量文獻中可以看出,在實際應用中,往住是將模糊控制或模糊推理的思想,與其他相對成熟的控制理論或方法結合起來,發揮各自的長處,從而獲得理想的控制效果。
如:利用模糊複合控制理論的分檔控制,將PI或PID控制策略引入Fuzzy控制器,構成Fuzzy-PI或Fuzzy-PID複合控制;適應高階系統模糊控制需要的三維模糊控制器;將精確控制和模糊控制結合起來的精確—模糊混合控制;將預測控制與模糊控制相結合,利用預測模型對控制結果進行預報,並根據目標誤差和操作者的經驗應用模糊決策方法線上修正控制策略的模糊預測控制等。
模糊控制的發展過程中,提出了多種自組織、自學習、自適應模糊控制器。它們根據被控過程的特性和系統參數的變化,自動生成或調整模糊控制器的規則和參數,達到控制目的。這類模糊控制器在實現人的控制策略基礎上,又進一步將人的學習和適應能力引入控制器,使模糊控制具有更高的智能性。自校正模糊控制器、參數自調整模糊控制等控制方法也都較大地增強了對環境變化的適應能力。
模糊控制與其他智能控制方法的結合組成的模糊控制,如專家模糊控制能夠表達和利用控制複雜過程和對象所需的啟髮式知識,重視知識的多層次和分類的需要,彌補了模糊控制器結構過於簡單、規則比較單一的缺陷,賦予了模糊控制更高的智能。
二者的結合還能夠擁有過程式控制制複雜的知識,並能夠在更為複雜的情況下對這些知識加以有效利用。
基於神經網路的模糊控制能夠實現局部或全部的模糊邏輯控制功能。
模糊控制器正向著自適應、自組織、自學習方向發展,使得模糊控制參數、規則在控制過程中自動地調整、修改和完善,從而不斷完善系統的控制性能,達到更好的控制效果,而與專家系統、神經網路等其他智能控制技術相融合成為其發展趨勢。
模糊控制的基本思想是利用電腦來實現人的控制經驗,而這些經驗多是用語言表達的具有相當模糊性的控制規則。模糊控制器(Fuzzy Controller,即FC)獲得巨大成功的主要原因在於它具有如下一些突出特點:
模糊控制是一種基於規則的控制。它直接採用語言型控制規則,出發點是現場操作人員的控制經驗或相關專家的知識,在設計中不需要建立被控對象的精確數學模型,因而使得控制機理和策略易於接受與理解,設計簡單,便於應用。
由工業過程的定性認識出發,比較容易建立語言控制規則,因而模糊控制對那些數學模型難以獲取、動態特性不易掌握或變化非常顯著的對象非常適用。
基於模型的控制演算法及系統設計方法,由於出發點和性能指標的不同,容易導致較大差異;但一個系統的語言控制規則卻具有相對的獨立性,利用這些控制規律間的模糊連接,容易找到折中的選擇,使控制效果優於常規控制器。
模糊控制演算法是基於啟發性的知識及語言決策規則設計的,這有利於模擬人工控制的過程和方法,增強控制系統的適應能力,使之具有一定的智能水平。
模糊控制系統的魯棒性強,干擾和參數變化對控制效果的影響被大大減弱,尤其適合於非線性、時變及純滯後系統的控制。
- 簡化系統設計的複雜性,特別適用於非線性、時變、模型不完全的系統上。
- 利用控製法則來描述系統變數間的關係。
- 不用數值而用語言式的模糊變數來描述系統,模糊控制器不必對被控制對象建立完整的數學模式。
- 模糊控制器是一語言控制器,使得操作人員易於使用自然語言自然語言進行人機對話。
- 模糊控制器是一種容易控制、掌握的較理想的非線性控制器,具有較佳的適應性及強健性(Robustness)、較佳的容錯性(Fault Tolerance)。
模糊控制的缺點[6]
1.模糊控制的設計尚缺乏系統性,這對複雜系統的控制是難以奏效的。所以如何建立一套系統的模糊控制理論,以解決模糊控制的機理、穩定性分析、系統化設計方法等一系列問題;
2.如何獲得模糊規則及隸屬函數即系統的設計辦法,這在目前完全憑經驗進行;
3.信息簡單的模糊處理將導致系統的控制精度降低和動態品質變差。若要提高精度則必然增加量化級數,從而導致規則搜索範圍擴大,降低決策速度,甚至不能實時控制;
4.如何保證模糊控制系統的穩定性即如何解決模糊控制中關於穩定性和魯棒性問題。
模糊控制理論主要研究內容[3]
模糊控制理論主要研究內容:模糊控制穩定性,模糊模型的辨識,模糊最優控制,模糊自適應控制,與其他控制結合等。如將智能控制與傳統控制方法相結合,產生了模糊變結構控制(FVSC),自適應模糊控制(AFC),自適應神經網路控制(ANNC),神經網路變結構控制(NNVAC),神經網路預測控制(ANNPC),模糊預測控制(FPC),專家模糊控制(EFC),模糊神經網路控制(FNNC),專家神經網路控制(ENNC)等方法。
模糊控制系統[6]
模糊控制以現代控制理論為基礎,同時與自適應控制技術、人工智慧技術、神經網路技術的相結合,在控制領域得到了空前的應用。
Fuzzy-PID複合控制是模糊技術與常規PID控制演算法相結合,以達到較高的控制精度。當溫度偏差較大時採用Fuzzy控制,響應速度快,動態性能好;當溫度偏差較小時採用PID控制,使其靜態性能好,滿足系統控制精度。因此它比單個的模糊控制器和單個的PID調節器均有更好的控制性能。
這種控制方法具有自適應自學習的能力,能自動地對自適應模糊控制規則進行修改和完善,以提高控制系統的性能。對於那些具有非線性、大時滯、高階次的複雜系統有著更好的控制性能。
也稱為比例因數自整定模糊控制。這種控制方法對環境變化有較強的適應能力,在隨機環境中能對控制器進行自動校正,使得被控對象特性變化或擾動情況下控制系統保持較好性能。
- 專家模糊控制EFC(Expert Fuzzy Controller)
模糊控制與專家系統技術相結合,進一步提高了模糊控制器智能水平。這種控制方法既保持了基於規則的方法的價值和用模糊集處理帶來的靈活性,同時把專家系統技術的表達與利用知識的長處結合起來,能處理更廣泛的控制問題。
其特點在於IC演算法具有比例模式和保持模式兩種基本模式。這兩種特點使得系統對誤差絕對值變化時,可使系統處於閉環運行和開環運行兩種狀態。這樣能妥善解決穩定性、準確性、快速性的矛盾,能較好地應用於純滯後對象。
- 神經模糊控制(Neuro-Fuzzy Control)
這種控制方法以神經網路為基礎,利用了模糊邏輯具有較強的結構性知識表達能力,即描述系統定性知識的能力以及神經網路的強大的學習能力與定量數據的直接處理能力。
這種控制適用於多變數控制系統。一個多變數模糊控制器有多個輸入變數和輸出變數。
案例一:模糊控制理論在經濟預測中的運用[7]
一、前言
1965年美國控制論專家Zadeh教授創立了模糊集理論,為描述和研究模糊現象提供了有力的數學工具。1974年英國自動控制專家E.H.Mamdani教授成功地將模糊語言邏輯運用於工業過程,標志著模糊控制的誕生。近40年來,模糊控制理論取得了很大的發展,在眾多領域得到了廣泛的應用。
在經濟領域,經濟計量學中是根據經濟學和統計學理論,利用給定的數據建立模型,用於經濟預測、策略評估等。所謂預測就是利用樣本數據和樣本估計模型來估計系統未來時刻的預測值。到目前為止,經濟計量學中幾乎所有的預測模型都把經濟現象視為一種隨機現象,根據統計學理論為之建立預測模型。然而許多經濟現象不僅僅具有隨機性,同時也具有模糊性。例如,當我們說某商品的質量好時,術語“好”就是一個模糊概念。對這類經濟現象,如果僅考慮其隨機性而忽略其模糊性,顯然所建立的模型預測效果不會太理想。另外,有些經濟現象中的有關因素不一定存在統計關係,這樣就很難對它們建立統計模型。有時為了得到較高的模擬效果,常常增加外生變數的數目來建立多變數模型,這樣不但增加了計算量,而且積累了誤差。然而將某些因素適當地進行模糊化處理就可提高預測精度。
針對以上幾個問題,本文提出建立模糊控制模型來進行經濟預測。主要思想是:在影響內生變數的眾多因素中,突出主要因素,把外生變數和內生變數之間的關係看作模糊關係,運用模糊控制的基本理論和方法建立模型。
二、模糊控制系統在經濟領域的應用
模糊控制理論已成功地運用於眾多領域,包括經濟領域,這裡將利用模糊控制理論來建立一個模糊控制模型,用它來對一類具有模糊性因素的經濟現象進行經濟預測。
根據統計分析方法中的主元素分析法,從與內生變數相關的眾多因素中選取主要因素作為輸入變數。建模步驟如下:步驟一:把輸入輸出空間劃分為模糊空間建立模糊控制模型時,所有的輸入輸出變數都需要模糊化,用模糊集合來表示。如選一變數z,將其論域[a,b]等分為k個子區間,定義k+1個模糊集合,為計算簡便起見,這裡選三角形隸屬度函數。
步驟二:建立模糊規則首先,根據給定的數據對生成模糊規則。具體做法為:對每組輸入輸出數據 確定
確定 和yp分別隸屬於模糊集
和yp分別隸屬於模糊集 和
和 的隸屬度值,Ni和Ny分別表示根據步驟一在變數xi和y論域上定義的模糊集的數。選擇使得
的隸屬度值,Ni和Ny分別表示根據步驟一在變數xi和y論域上定義的模糊集的數。選擇使得 具有最大隸屬度值的模糊集
具有最大隸屬度值的模糊集 ,類似的選擇
,類似的選擇 ,則得模糊規則:如果x1為A1j * 且…且xn為
,則得模糊規則:如果x1為A1j * 且…且xn為 ,則y為。
,則y為。
(註:若由輸入輸出數據對生成衝突規則,即規則的“IF”部分相同而“THEN”部分不同,這時可為每條規則賦予一個強度,然後從衝突的規則群中選擇強度最大的一條。)其次,在實踐中,輸入輸出數據對比較少時,生成的規則也比較少,會導致模型達不到預期的精度。這時可以請該領域的專家根據他們的經驗給出一些控制規則,這也是模糊控制的特點,即結合專家經驗。
直觀上,可以把一個模糊規則庫描述成一個兩維輸入的表格,每一個空格對應著一條規則。這種建立模糊規則庫的方法可以看作是用恰當的規則來填表格,故稱其為查表法。
步驟三:構造模糊系統根據步驟二中生成的模糊規則庫,選用帶有單值模糊器、模糊規則庫規則、乘積推理機和中心平均解模糊器的模糊系統,其模型為: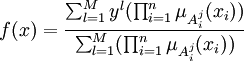 。
。
其中, 是外生變數,f(x)是內生變數。
是外生變數,f(x)是內生變數。
由模型公式(1)可見,輸出f(x)是一個精確值,但在實際應用中不可能準確無誤地預測一個值,必定帶有誤差。設真值為y * ,則可用相對誤差 衡量預測的準確度。
衡量預測的準確度。
三、實例分析
眾所周知,商品的銷售與商品的價格、廣告促銷費、信譽、品牌等眾多因素有關。為了檢測本文設計的模糊控制模型的效果,這裡選擇一種商品,其銷售主要受廣告促銷費和信譽(其評定是模糊的)影響。數據調查如下:
2003年到2007年數據
| 年度 | 2003 | 2004 | 2005 | 2006 | 2007 |
| 廣告促銷費(百萬美元) | 5298 | 5878 | 6383 | 6829 | 7123 |
| 銷售收入(百萬美元) | 57692 | 63941 | 69497 | 74037 | 79049 |
| 信譽 | 一般 | 較低 | 較高 | 一般 | 較高 |
選廣告促銷費和信譽為輸入變數,銷售收入為輸出變數。信譽已經是一個模糊變數,設B1={低},B2={較低},B3={一般},B4={較高},B5={高},將其定義在[1,5]上。分別將廣告促銷費和銷售收入劃分為7個模糊集 和
和 。三個變數均取如(13)的三角隸屬度函數。
。三個變數均取如(13)的三角隸屬度函數。
根據建模步驟中的第二步建立規則庫,得模糊規則如下表:
表:模糊規則
| A1 | A2 | A3 | A4 | A5 | A6 | A7 | |
| B1 | C1 | C1 | C1 | C1 | C2 | C2 | C3 |
| B2 | C1 | C3 | C3 | C3 | C4 | C4 | C4 |
| B3 | C2 | C3 | C3 | C5 | C5 | C5 | C6 |
| B4 | C2 | C4 | C4 | C5 | C6 | C6 | C6 |
| B5 | C3 | C4 | C5 | C6 | C6 | C7 | C7 |
(註:表中黑體的規則是由數據對生成,其它來自專家經驗)現已知2008年該商品的廣告促銷費為7789百萬美元,信譽評價為高,則根據本文建立的模糊控制預測模型,應用Matlab[8]編程計算2008年的銷售收入為79998百萬美元。經調查知2008年該商品真正收入為80853,相對誤差為1.06%,易見預測結果比較好。
註:本文為了說明所設計模糊控制模型如何工作,為簡便起見,所選實例考慮因素較少,在具體運用該模型進行經濟預測時,可考慮更全面,多選幾個相關因素作為輸入變數,則預測結果將會更好。
應用模糊控制的基本理論和方法建立的模糊控制模型,與用經濟學和統計學原理所建立的模型相比較,可以更簡單方便地對一類具有模糊性相關因素的經濟現象進行比較準確的預測。模糊控制充分考慮了專家的知識經驗,對具有模糊因素的系統具有其它控制無法比擬的優越性。隨著模糊控制理論的發展與完善,模糊控制在自然科學和工程實踐中也將得到越來越廣泛的應用。
- ↑ 張文匯.模糊控制理論淺析[J].伊犁教育學院學報,2002,15(4)
- ↑ 2.0 2.1 高桂革.模糊控制理論及其應用的發展[J].上海電機學院學報,2005,8(5)
- ↑ 3.0 3.1 孫增圻.智能控制理論與技術[M].北京:清華大學出版社,1992
- ↑ 俞金壽.工業過程先進控制[M].北京:中國石化出版社,2002
- ↑ 陳翰馥.作為基礎研究的自動控制理論[J].自動化學報,2002,28(增刊):1-3.
- ↑ 6.0 6.1 楚焱芳.模糊控制理論綜述[J].科技信息,2009,(20)
- ↑ 申瑞玲.模糊控制理論在經濟預測中的運用[J].科技經濟市場.2009(04)
- ↑ 吳曉莉,林哲輝.Matlab輔助模糊系統設計[M].西安電子科技大學出版社,2002







非常不錯